Robo Duo
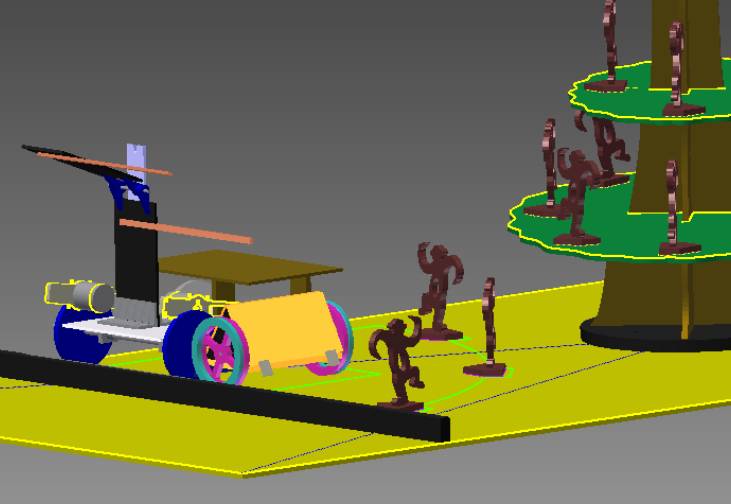
CAD assembly of our unfoldable tall robot (Hobbes) and our mini robot (Calvin) within the designated start space
My first ever robot build at UCSD was a team build to reach the goal of taking more plastic monkeys off of a tree against an opposing team and carrying them to our collection zone behind the robot start point.
Our robot was required to fit in a 10"x10"x10" boundary before initial startup and also to use only mechanical controls with no programmable controller (only a series of on/off/reverse switches). The tree itself was larger than 10” so we eventually created a robot that could unfold out to reach the highest tier. The minibot would bet there to “annoy” the other team and prevent their progress: therefore, “annoying” Calvin the mini bot and tall Hobbes the unfoldable.
This is a formative moment for me when I really learned that I could make and iterate on a nebulous idea; eventually making it a reality. Learning all of the maker’s tools and working with my team was so incredibly rewarding that it got me all fired up about the product development process!
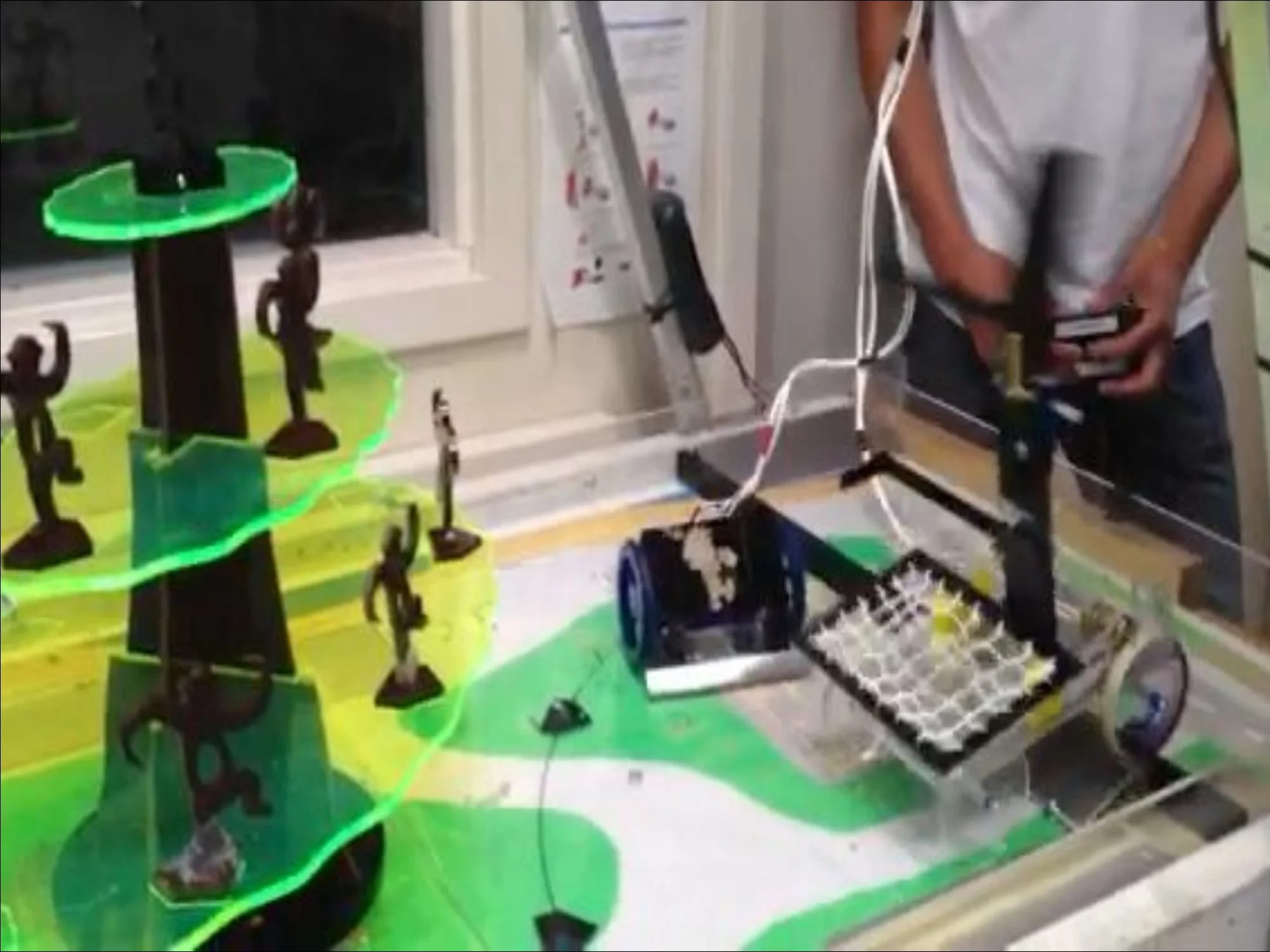
A still from the video the TA
took of our robot in action
(whole video sadly
lost to the archives)
My role in this build was:
project management/gantt chart scheduling
I coordinated with my group members and their schedules, assigning different components of the build that each person would be both best suited for and what they would be excited to work on!
ideation and fabrication for the net, folding method, and mini bot
My main contribution was for the mini robot. With our limited motors, we felt it was best to attribute some power to counter the opposing team from taking all the monkeys. Unfortunately, all the other teams thought our idea was great and immediately made ramps and other countermeasures.
I learned how to weave netting for this project as well!
the folding method was something I had suggested in the beginning, but it was my amazing teammates that were able to solve a way for us to unfold without the use of a solenoid (the solenoid being something that the professor and TA suggested would solve our problem, but not something we were allowed to use for our build)
we eventually went with multiple rubber bands tied in a specific way, after extensively learning about the difference between extension and compression springs
Fabrication (use of LaserCAMM, soldering wire leads to motors, assembling parts of robot)
I learned to solder from this freshman engineering class! I went and taught my teammates during lab (and also taught people in future projects)
we were able to use large sheets of acrylic cut by our lab’s large format CO2 laser cutter
Solid-modeling in Solidworks and AutoCAD Inventor
this began my love for CAD programs, it felt like a foundation to begin my passion for product design




















